Appearance
Мотор Xing 2814
Задача.
Знайти двигун найбільшої енергоефективності що задовольняє умові польоту з заданою вагою.
Умови.
коефіцієнти консервативності:
- battery_score. ефективність батареї 80%
- throttle_score. для апрокрисмованої мат моделі коефіцієнт необхідного throttle для здійснення рейсового польоту: 1.5 (тобто закладаємо на маневри і споживання відпрацювань не ламінарного потоку і рельʼєфу, додатково 50% енергії)
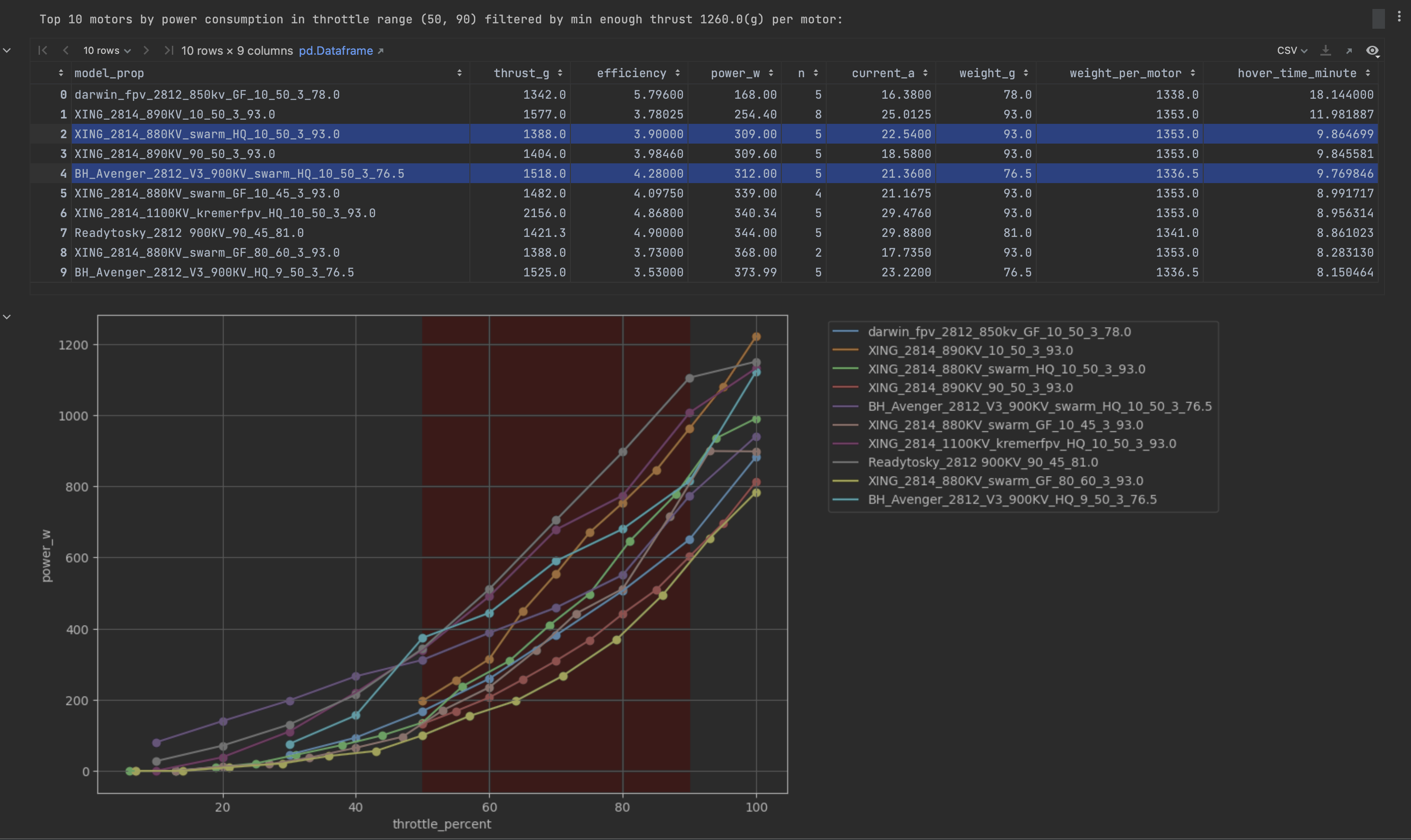
Прямий аналіз таблиці
Аналізується діапазон throttle в кордонах ThrottleMin мінімально достатнього для утворення підйомної ваги на один мотор і максимально комфортного для здійснення польоту throttle_percent 80|90% у якості верхнього кордону ThrottleMax (коли стік на 100% тротлу це вже не політ). Між цими значеннями throttle береться avrg thrust_g і в цій точці обраховується значення power_w - що буде відповідати середньому споживанню енергії протягом польоту. Знаючи середнє споживання енергії - можемо обчислити час польоту з заданим payload
Математична модель
Модель побудована на лінійній регресії навколо таблиць сирих даних від виробників або волонтерів. Більш точні значення споживання енергії в заданій точці дають можливість застосувати консервативний коефіцієнт на маневри підчас польоту і вивести більш акуратне значення споживання як наслідок - час польоту.
Disclaimer
- Жоден зі способів предікту не враховує аеродинамічні особливості руху дрону, а також фактори навколишнього середовища: вітер, щільніcть повітря (
air_density) - На даному етапі розробки маю питання до певних відхилень в акуратності навченої моделі, тому більше спираюсь на усереднені дані з сирих таблиць, розраховуючи з часом підкорегувати модель на великому обʼємі
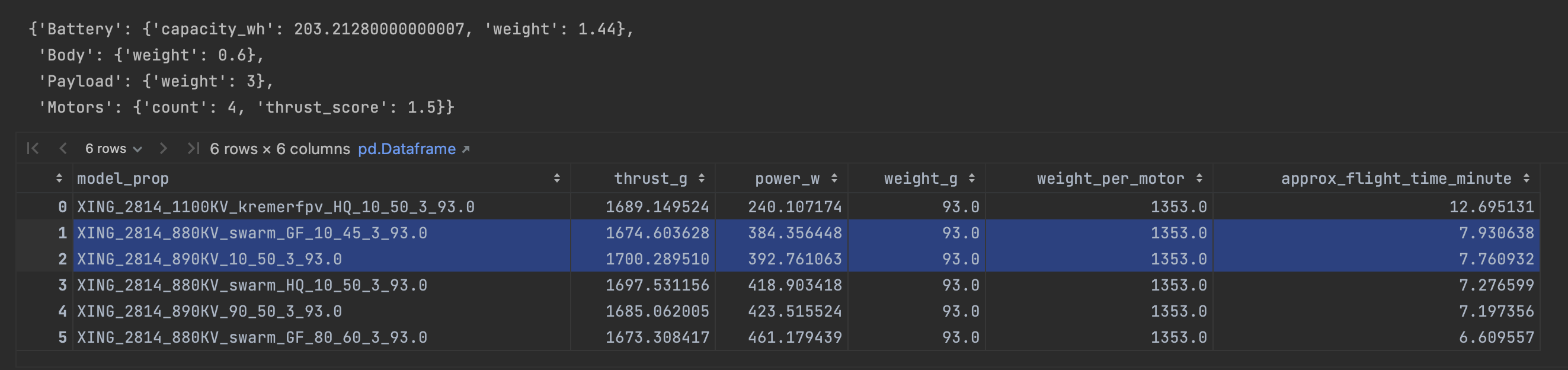
drone = {
"Battery": { #6s3p
'capacity_wh': 203, #effective avrg Wh (incl: score)
'weight': 1.44, #kg
},
"Body": {
'weight': 0.6, # kg approx: frame (0.3)+StackVtxAntennasCamera(0.1)+Drop(0.1)
},
"Payload": {
'weight': 3, #3kg
},
'Motors': {
'count': 4,
'thrust_score': 1.5, # 1-hover, 1.5-2-long range flight. used to calculate min enough thrust per motor in real flight (horizontal movement, maneuvering)
},
}Перше що хочеться відмітити що заміри від swarm.army досить серйозно "приземляють" завищений оптимізм даних вендора 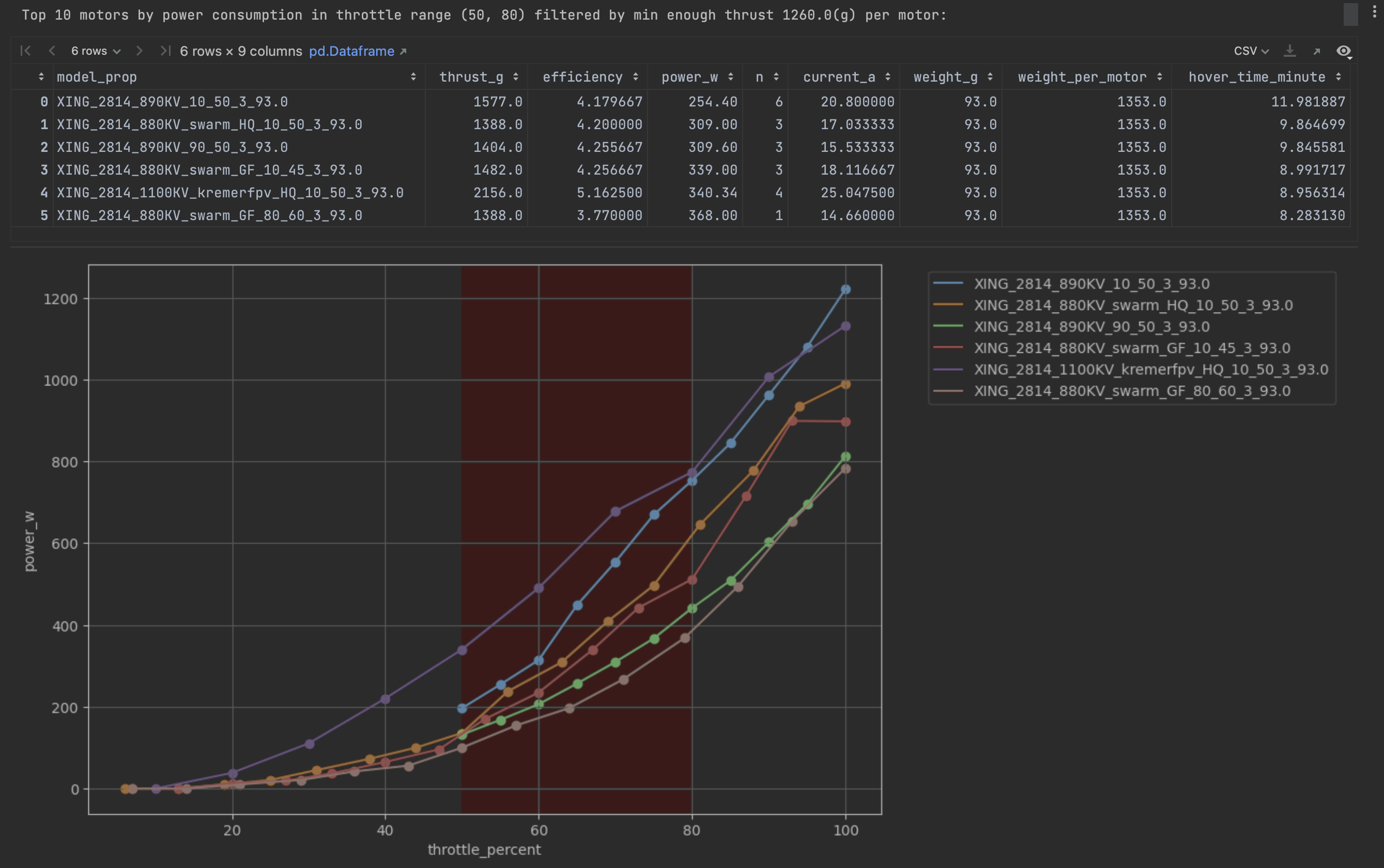
Друге - на моделюванні польоту відрив вже не такий сильний і волонтерський замір більш оптимістичний ніж вендорний *повʼязую з тим що модель під час навчання має певний ефект згладжування викидів
 Між однокласниками маємо наступну картину Досить незначний відрив від BH Avenger що в свою чергу має і меншу вагу і меншу висоту статора. (* цікаво що по температурі)
Між однокласниками маємо наступну картину Досить незначний відрив від BH Avenger що в свою чергу має і меншу вагу і меншу висоту статора. (* цікаво що по температурі)
 модель з throttle_score дає набагато більший відрив на користь BH Avenger
модель з throttle_score дає набагато більший відрив на користь BH Avenger 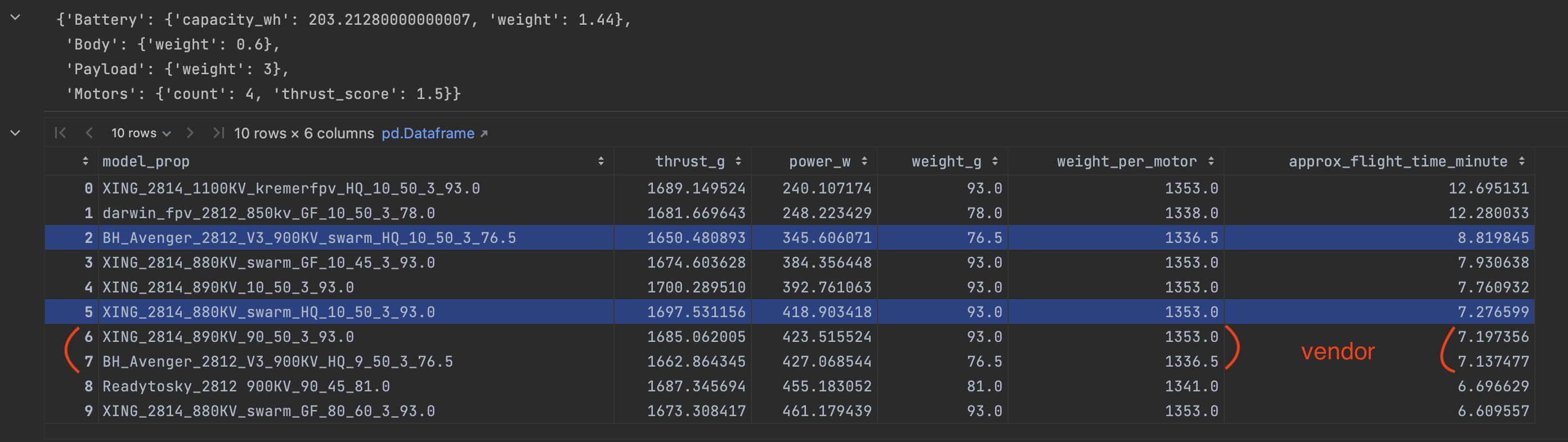
Якщо порівнювати зі "старшокласниками" (3115) - малий двигун від xing показує гарний результат на грубому обчисленні тяги на кількість енергії з табличних даних 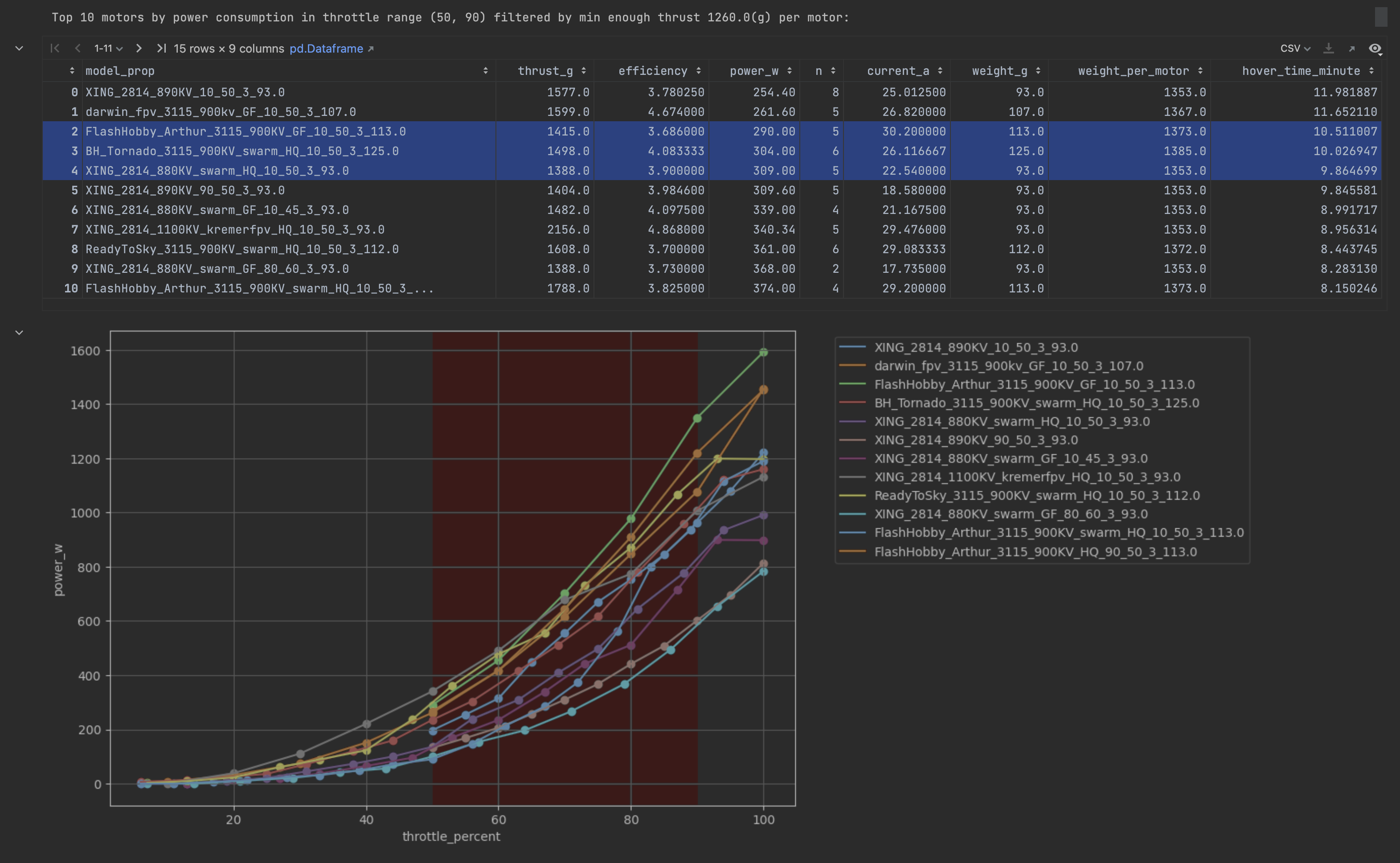 на моделі з
на моделі з throttle_score в топ виходить проп 1045, а HQ1050 лишається на менших позиціях. Зрештою загальна різниця flight_time не перевищує 1хв 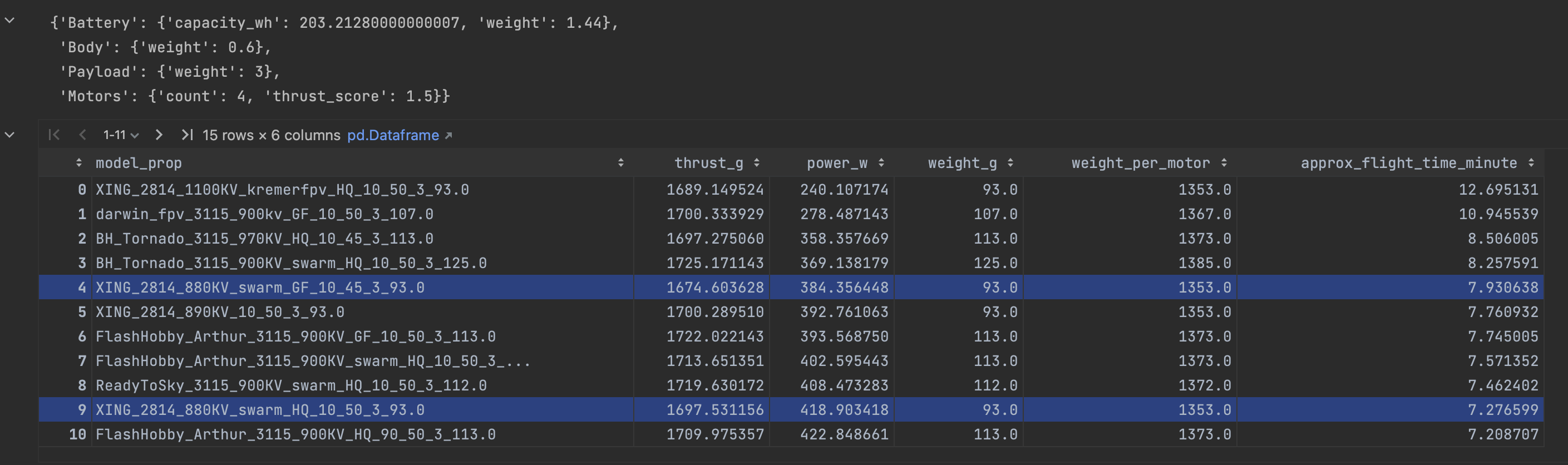
З огляду на ціну за Xing двигун, BH Avenger виглядає більш прийнятним варіантом серед 28-х розмірів. Іншим критерієм може слугувати надійність і довговічність, на що безпосередньо буде впливати температура нагріву при навантаженні, якщо мова про невеликі 9-10" багаторазові бомбери.